3D-Lasermesstechnik




Vision-Systeme der Zukunft
Für unterschiedliche industrielle Anwendungen liefern wir 2D und 3D Lasermesstechnik für Robotersysteme. Ein typischer Einsatz ist die automatische Lageerkennung zur Entnahme von Bauteilen auf Paletten oder Gitterboxen mit Roboter. Weiterhin werden unsere Systeme bei der der Qualitätskontrolle eingesetzt.
Schlüsselfertige Gesamtanlagen und integrierbare Einzelsysteme im Bereich Lageerkennung und Roboterdepalettierung
-Depalettierung von Kisten, Kartons, Blister, Säcke, Gussteile, Fässer, Eimer, Kanister mittels Scanner und Roboter
In der Regel ist eine SPS oder ein Roboter die übergeordnete Steuerung der folgenden Applikationen. Die Kommunikation zwischen 3D-Auswerte-PC und SPS / Roboter erfolgt mittels ProfiBus, ProfNet, Ethernet TCP/IP, CAN-Bus, DeviceNet oder RS232. Die Scan-Frequenz beträgt typisch 330 Hz, bei einer Winkelauflösung von 0,125°. Alternative Scanfrequenz / Winkelauflösung ist 270 Hz bei einer Winkelauflösung von 0.10 Grad
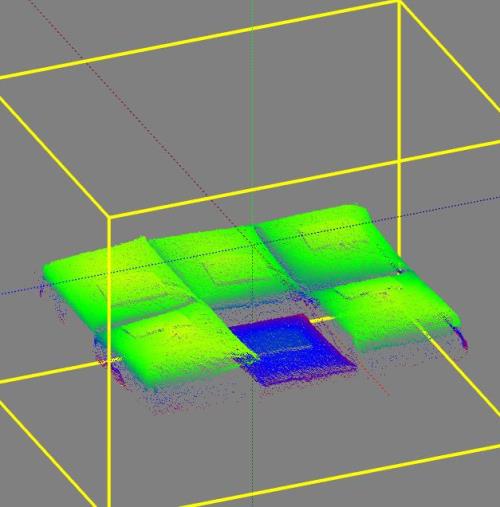
Applikationsbeispiel: Depalettierung vom Stapel mittels Roboter
Die zu depalettierenden Objekte können rund, oval oder asymmetrisch sein. Die Höhe beträgt 50 bis 150mm. Die Kontur wird einer CAD-Datei entnommen. Diese CAD-Datei enthält weitere Informationen zum Objekt wie Greifpunkte, Greifer-Typ, Greifer-Einstellung und Greif-Winkel.
Die Werkstücke sind in bis zu 10 Lagen mit einer Positions-Toleranz von ± 300 mm gestapelt. Je nach Kontur ist eine Verdrehung möglich.
Der Scanner befindet sich in Front zur Palette auf einer Linear-Achse. Nach jeder Entnahme eines Werkstückes durch den Roboter wird eine Scannung durchgeführt.

Lagetoleranz der Objekte : +/- 300 mm
Verdrehung Objekte : +/- 45 Grad
Genauigkeit X / Y / Z : +/- 2 mm
Geschwindigkeit Linearachse : 1000 mm/s
Dauer Mess-Zyklus incl. Auswertung : 700 ms
Weitere Applikationen:
Bin-Picking – Griff in die Kiste
Roboteranlagen mit 3D Laserscanner
Applikationen – Für jede Anforderung die ideale Lösung